import deepinv as dinv
from perspective_ei import *
device = get_device()Perspective-Equivariant Imaging: an Unsupervised Framework for Multispectral Pansharpening
Authors: Andrew Wang, Mike Davies, School of Engineering, University of Edinburgh
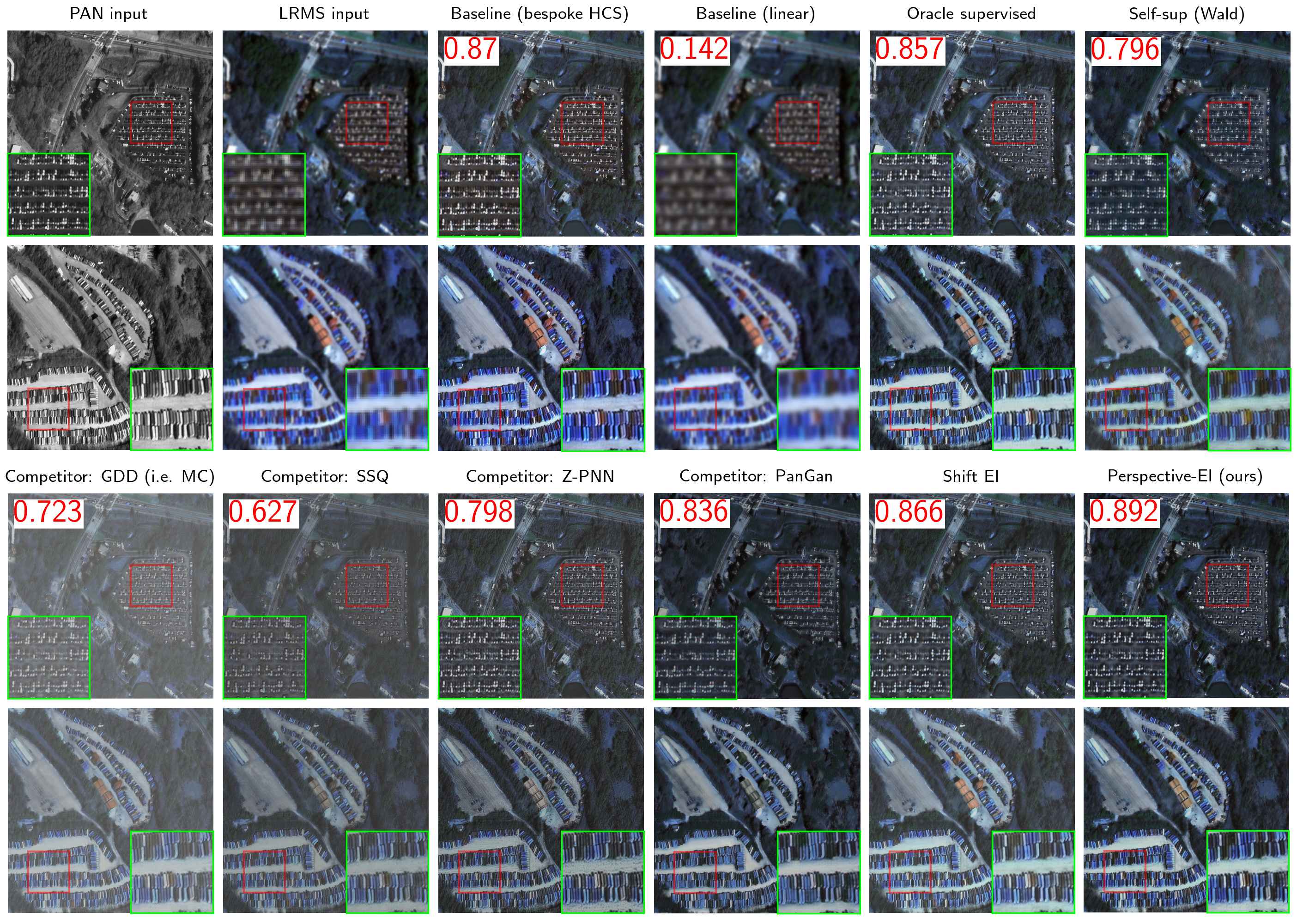
Abstract: Ill-posed image reconstruction problems appear in many scenarios such as remote sensing, where obtaining high quality images is crucial for environmental monitoring, disaster management and urban planning. Deep learning has seen great success in overcoming the limitations of traditional methods. However, these inverse problems rarely come with ground truth data, highlighting the importance of unsupervised learning from partial and noisy measurements alone. We propose perspective-equivariant imaging (EI), a framework that leverages perspective variability in optical camera-based imaging systems, such as satellites or handheld cameras, to recover information lost in ill-posed optical camera imaging problems. This extends previous EI work to include a much richer non-linear class of group transforms and is shown to be an excellent prior for satellite and urban image data, where perspective-EI achieves state-of-the-art results in multispectral pansharpening, outperforming other unsupervised methods in the literature.
Citation
@article{wang2024perspective,
title={Perspective-Equivariant Imaging: an Unsupervised Framework for Multispectral Pansharpening},
author={Wang, Andrew and Davies, Mike},
year={2024},
url={https://arxiv.org/abs/2403.09327}
}1. Results
2. Background
2.1 Multispectral pansharpening
The pansharpening inverse problem seeks to recover high-resolution multispectral (HRMS) images \(x\) from low-resolution multispectral (LRMS) \(\mathbf{y}_\text{MS}\) and high-resolution panchromatic (single-band) \(\mathbf{y}_\text{pan}\) images. The forward operator is:
\[\left\{\mathbf{y}_\text{MS},\mathbf{y}_\text{PAN}\right\}\sim\mathcal{P}\left(\mathbf{A}_\text{PS}\mathbf{x}\right)=\left\{\mathcal{P}\left(\mathbf{A}_\text{SR}\mathbf{x}\right),\mathcal{P}\left(\mathbf{R}_\text{PAN}\mathbf{x}\right)\right\}\]
where \(\mathbf{R}_\text{PAN}\) is the pan channel’s SRF, \(\mathbf{A}_\text{SR}\mathbf{x}=(\mathbf{k} * \mathbf{x}) \downarrow_j\) is the \(j\times j\)-factor downsampling operator with anti-aliasing kernel \(\mathbf{k}\), and \(\mathcal{P}\) is the Poisson noise operator. We simulate a tiny dataset of WorldView-2 tiles taken from SpaceNet-4 (see vis):
dataset_name = "spacenet"
noise_gain = 0.
img_shape = (4, 1024, 1024)
ratio = 4physics = Pansharpen(img_shape, factor=ratio, device=device)
if noise_gain > 0.0:
physics.noise_model = dinv.physics.PoissonNoise(gain=noise_gain, clip_positive=True) train_dataloader, test_dataloader = make_dataloaders(dataset_name, physics, device=device)x, y = next(iter(test_dataloader))
x, y = x.to(device), y.to(device)
plot_multispectral(x, y)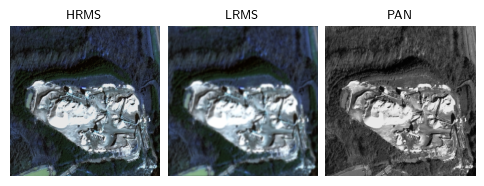
2.2 Projective transformations
Camera-based imaging systems move and rotate freely in the world. In satellite imaging, scenes are generally imaged off-nadir, i.e. the focal line does not pass through the Earth point located vertically below, resulting in a perspective distortion.
Our proposed perspective-EI uses the natural belief that unknown image sets are invariant to changes in perspective to solve these inverse problems without ground truth (GT), by considering the group of non-linear projective transformations \(\mathbf{T}_g\). Note that we do not have access to the GT images \(x\), we just show these for demonstration:
transform = Homography(
n_trans = 1,
theta_max = 5, #degrees
theta_z_max = 0,
shift_max = 0,
skew_max = 0,
zoom_factor_min = 1,
x_stretch_factor_min = 1,
y_stretch_factor_min = 1,
device=device
)
plot_multispectral([x, transform(x), transform(x), transform(x)])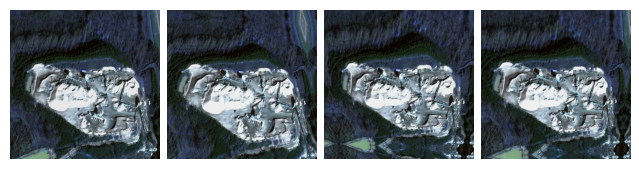
2.3 Perspective-equivariant imaging
The EI framework learns to invert from measurements \(y\) alone:
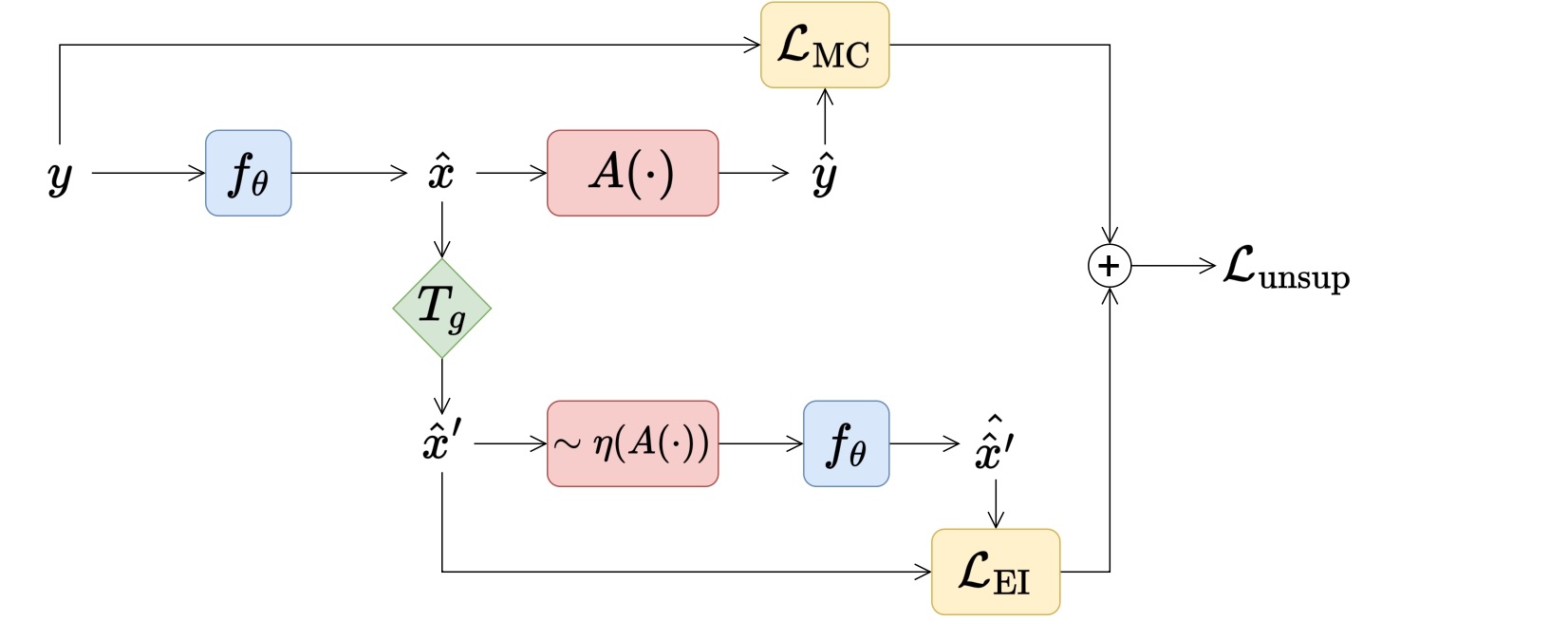
Our proposed loss function adds perspective-EI onto a spectral and structural measurement consistency (MC) loss:
\[\mathcal{L}_\text{unsup}(\theta;\mathbf{y},g)=\lVert\mathbf{A}f_\theta(\mathbf{y})-\mathbf{y}_\text{MS}\rVert_2^2+\lVert \mathbf{R}_\text{pan}f_\theta(\mathbf{y})-\mathbf{y}_\text{pan}\rVert_\text{TV}+\mathcal{L}_\text{EI}(\theta;\mathbf{y},g)\]
In the noisy scenario, both the spectral and structural MC losses are replaced by SURE losses. We assume a flat \(\mathbf{R}_\text{pan}\) that simply averages the channels.
if noise_gain > 0:
loss_spectral = SurePoissonSpectralLoss(gain=noise_gain, tau=1e-2) #tau from (Chen et al. 2022: Robust Equivariant Imaging, Appendix C.3)
loss_structural = SurePoissonStructuralLoss(gain=noise_gain, tau=1e-2, srf_from="average")
else:
loss_spectral = dinv.loss.MCLoss(metric=LRMS_MSELoss(ratio))
loss_structural = TVStructuralLoss(srf_from="average")
losses = [loss_spectral, loss_structural, dinv.loss.EILoss(transform, metric=HRMS_MSELoss(), weight=1.)]3. Training
We train with the PanNet neural network, but any NN model can be used since our method is independent of the choice of NN. We train our models using deepinv which is built on PyTorch.
model = PanNet(
backbone_net=ResNet(hidden_channels=32, num_blocks=4),
hrms_shape=img_shape,
scale_factor=ratio,
highpass_kernel_size=51,
device=device,
).to(device)optimizer, scheduler = make_optimizer_scheduler(model, lr_init=1e-3)
model = dinv.train(
epochs=10,
model=model,
losses=losses,
physics=physics,
train_dataloader=train_dataloader,
eval_dataloader=test_dataloader,
scheduler=scheduler,
optimizer=optimizer,
device=device,
verbose=True,
ckp_interval=99,
img_interval=99,
freq_plot=99,
)The model has 77124 trainable parametersEpoch 1: 100%|█| 10/10 [00:04<00:00, 2.46it/s, eval_psnr=20.3, loss_mc=0.0103, loss_TVStructural=0.000693, loss_ei=0.00
Epoch 2: 100%|█| 10/10 [00:03<00:00, 2.55it/s, eval_psnr=19.2, loss_mc=0.00687, loss_TVStructural=0.000447, loss_ei=0.0
Epoch 3: 100%|█| 10/10 [00:03<00:00, 2.51it/s, eval_psnr=19.5, loss_mc=0.00644, loss_TVStructural=0.000495, loss_ei=0.0
Epoch 4: 100%|█| 10/10 [00:03<00:00, 2.53it/s, eval_psnr=21.6, loss_mc=0.00677, loss_TVStructural=0.000509, loss_ei=0.0
Epoch 5: 100%|█| 10/10 [00:03<00:00, 2.53it/s, eval_psnr=21.5, loss_mc=0.00596, loss_TVStructural=0.00043, loss_ei=0.00
Epoch 6: 100%|█| 10/10 [00:03<00:00, 2.53it/s, eval_psnr=21.2, loss_mc=0.00577, loss_TVStructural=0.000453, loss_ei=0.0
Epoch 7: 100%|█| 10/10 [00:04<00:00, 2.48it/s, eval_psnr=22.4, loss_mc=0.00519, loss_TVStructural=0.000444, loss_ei=0.0
Epoch 8: 100%|█| 10/10 [00:04<00:00, 2.50it/s, eval_psnr=22.9, loss_mc=0.00497, loss_TVStructural=0.000475, loss_ei=0.0
Epoch 9: 100%|█| 10/10 [00:03<00:00, 2.51it/s, eval_psnr=22.2, loss_mc=0.00556, loss_TVStructural=0.000422, loss_ei=0.0
Epoch 10: 100%|█| 10/10 [00:03<00:00, 2.54it/s, eval_psnr=21.1, loss_mc=0.00503, loss_TVStructural=0.000391, loss_ei=0.3.1 Evaluation metrics
We report QNR (no reference) ERGAS, and PSNR. See Meng et al. benchmark for details.
model.eval()
x_hat = model(y.to(device), physics).detach()
qnr = QNR(physics, alpha=1., beta=1.5)(x_hat, y)
from torchmetrics.functional.image import error_relative_global_dimensionless_synthesis
ergas = error_relative_global_dimensionless_synthesis(x_hat, x, ratio=0.25).item()
psnr = dinv.utils.cal_psnr(x_hat, x)
print(f"QNR: {round(qnr, 3)}, PSNR: {round(psnr, 2)}, ERGAS: {round(ergas, 2)}")QNR: 0.776, PSNR: 18.65, ERGAS: 8.344. Competitors
We compare our pansharpening loss with 4 unsupervised methods from the literature: the losses from GDD, SSQ, Z-PNN and PanGan.
To train with them, simply replace losses with one of the following:
from perspective_ei.multispectral.competitors import *
GDD_losses = [
dinv.loss.MCLoss(metric=LRMS_MSELoss(ratio)),
TVStructuralLoss(srf_from="average")
]
SSQ_losses = [
SSQSpectralLoss(device=device),
SSQStructuralLoss(srf_from="average"),
QNRLoss()
]
ZPNN_losses = [
dinv.loss.MCLoss(metric=LRMS_L1Loss(ratio)),
ZPNN_CorrelationLoss(device=device)
]
PanGan_losses = [
dinv.loss.MCLoss(metric=LRMS_MSELoss(ratio)),
PanganStructuralLoss(srf_from="average", device=device),
PanganAdvGenLoss(srf_from="average", device=device),
PanganAdvDiscrimSpectralLoss(device=device),
PanganAdvDiscrimStructuralLoss(srf_from="average", device=device)
] # see perspective_ei.multispectral.competitors.pangan for training detailsAppendix: subgroup transforms
Transformations associated with subgroups of the homography, or projective transformation, can be recovered by fixing certain geometric parameters in Homography (see Theorem 1, Table 1 in the paper). Here are examples associated with the following subgroups:
- Euclidean group \(\mathbb{E}(2)\), which includes rotations (
dinv.transform.Rotate), translations (dinv.transform.Shift) and reflections. - Similarity group \(\text{S}(2)\), which also includes scalings (
dinv.transform.Scale). - Affine group \(\text{Aff}(3)\), which also includes skew and stretch.
- Pan+tilt+rotate group, which is isomorphic to 3D rotation \(\text{SO}(3)\) and includes pan, tilt and rotation, which contribute to a “perspective” effect.
x_sample = PIL2tensor("img/celeba_example.jpg")
dinv.utils.plot([
x_sample,
Euclidean()(x_sample),
Similarity()(x_sample),
Affine()(x_sample),
PanTiltRotate(theta_max=5)(x_sample)
], titles=[
"Original", "Euclidean", "Similarity", "Affine", "Pan+tilt+rotate"
])